
EXERCICE 1 :
Le montage ci-contre permet de protéger un moteur à courant continu,
 fonctionnant avec 2 sens. La protection est contre les positions limites où
fonctionnant avec 2 sens. La protection est contre les positions limites où
le moteur peut être calé ; dans ce cas le couple augmente, ainsi le
courant dans le moteur, ce qui peut détériorer le moteur. C'est le cas du
moteur du position d'antenne parabolique. La tension E est soit positive,
soit négative, suivant la commande qui n'est pas représentée ici, ainsi que
le système à came qui permet d'actionner les "fins de course" (fcw et fce).
Analyser le fonctionnement d'un tel montage. Les fins de course sont
fermés au repos.
CORRIGE :
- Au repos, on suppose le moteur dans une position où ni fcw ni fce n'est actionné.
- Quand le moteur tourne vers "West" et arrive à la position limite "West" fcw s'ouvre et le moteur s'arrête. Pour tourner vers "East", Il faut alors inverser le sens.
- En inversant le sens, la diode DW joue le rôle fcw pour un court instant, après quoi fcw se ferme (voir figure ci-dessous à gauche).
- En tournant vers "East" et arrivant à la position limite "East", fce s'ouvre et le moteur s'arrête. Pour tourner vers "West", Il faut alors inverser le sens.
- Et ainsi de suite (voir figure ci-dessous à droite).

EXERCICE 2 :
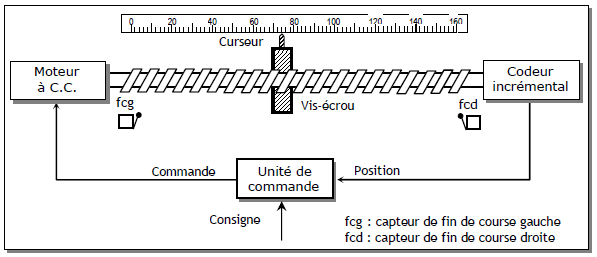
Les asservissements numériques, sont abondants dans le domaine industriel. On s'intéresse dans cette
étude à l'asservissement de postion. La structure du système est donnée à la figure ci-dessous. Sa
description est comme suit :
- Un curseur se déplace linéairement grâce à un système vis-écrou ;
- Le système vis-écrou est entraîné en rotation par un moteur à courant continu ;
- La position du curseur est captée par un codeur incrémental solidaire à l’axe du moteur ;
- La commande permet de comparer la position captée et la position de consigne ; si les 2 positions sont égales, on arrête le moteur.
0 commentaires: